LE NOUVEAU SCHÉMA
page1 - page2 - page3 - page4 - page5 - page6 - page7 - page8 - page9
Le schéma devient (sur fond bleuté, les éléments de la carte additionnelle : voir photos en bas de page) :
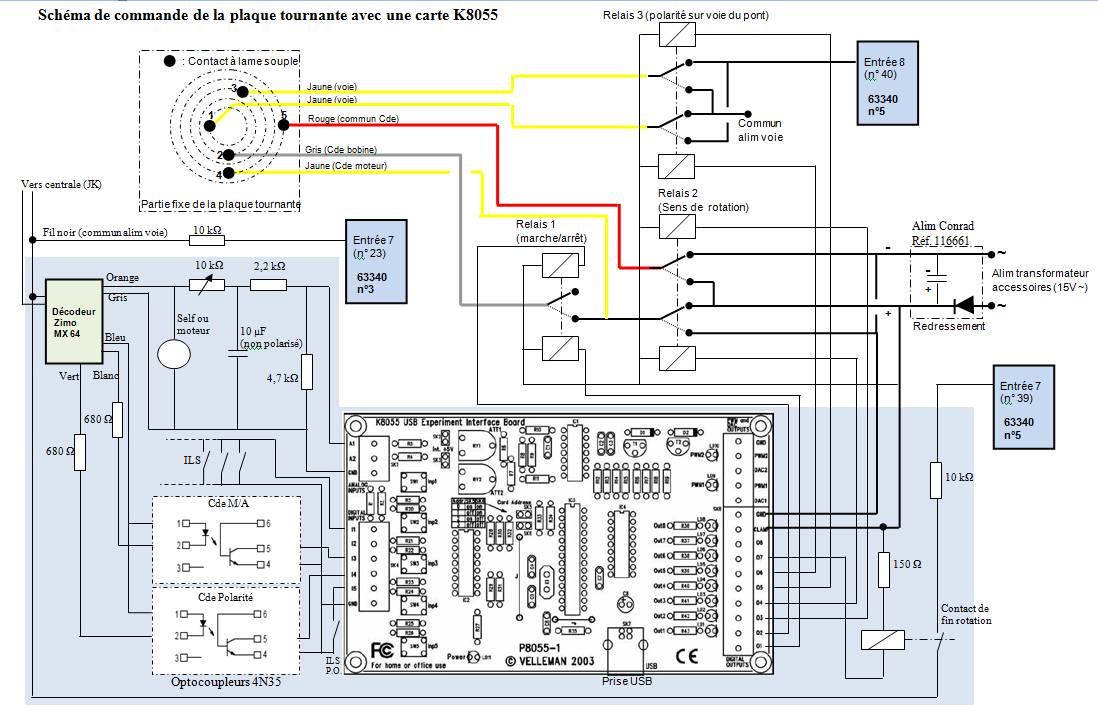
Le schéma de commande montre le conditionnement des signaux d’entrée de la carte K8055 en provenance du décodeur ZIMO MX64 (voir notice du ZIMO MX64) :
- la tension de commande (entre fils gris et orange) est de type MLI (c’est à dire modulée en largeur d’impulsion) qu’il faut convertir en tension analogique. A ses bornes sont branchés une charge selfique (self ou moteur) puis un filtre passe-bas constitué d’une résistance ajustable de 10K et d’un condensateur de 10 μF. Les résistances de 2,2K et de 4,7K sont montées en diviseur de tension pour ajuster la tension de 5V requise pour l’entrée analogique. Ainsi la tension MLI initialement délivrée est convertie en tension analogique 0 à 5V.
- La commande binaire de marche/arrêt (entre fils bleu et blanc) est obtenue par un optocoupleur 4N35 (entrée digitale 3 de la carte) (voir notice du 4N35) qui requiert une intensité d’entrée d’environ 30 mA, obtenue par la résistance de 680 ohms.
- C’est la même chose pour la commande de polarité de la voie du pont (entre fil bleu et vert) obtenue aussi à partir d’un optocoupleur 4N35 (entrée digitale 4 de la carte).
- Les 12 capteurs ILS, montés en parallèle, sont branchés directement sur l’entrée digitale 1 de la carte. Le choix de cette entrée (ou encore la n°2) est nécessaire car ces 2 entrées sont reliées à un compteur interne. Le comptage des impulsions d’entrée est donc automatique.
- Le capteur ILS de prise d’origine est relié à l’entrée 5 de la carte. La prise d’origine, déclenchée par un clic sur le bouton de l’interface logicielle, se substitue à la commande manuelle des relais pour une remise en position après incident éventuel. Cette fonction est bien sûr optionnelle.
Au niveau des sorties :
- les sorties étant à collecteur ouvert, la carte est alimentée en 18V continu afin de piloter les relais (alimentation 18V stabilisée Conrad 116661, voir page 2 de la rubrique alimentation).
- Les six bobines des relais sont connectées directement sur les sorties de la carte (sorties 3 à 8). Contrairement au montage précédent, c’est la polarité positive qui est commune aux bobines.
- La sortie 7 est reliée à la bobine d'un micro relais 12V. Le contact du relais est raccordé à une entrée (entrée 39) d’un module Uhlenbrock 63340. L'alimentation délivrant 18V, la résistance de 150 Ω permet d'abaisser la tension d'alimentation à 12V car l'impédance des bobines de ces relais est d'environ 300 Ω pour un courant de 40 mA. Cette sortie est activée par le programme de pilotage de la carte lorsque la rotation est achevée. Ainsi, cette information de rétrosignalisation informe Windigipet de la fin de la rotation.
Notes :
- L’entrée 23 du module Uhlenbrock 63340 est reliée au courant de traction via une résistance de 10K. Ceci permet de tromper Windigipet en lui faisant croire qu’une loco occupe la voie 23, ce qui permet de démarrer dans les tables horaires de Windigipet, tout mouvement incluant le pont tournant.
- L'utilisation des optocoupleurs 4N35 permet de découpler galvaniquement le circuit de commande du circuit commandé. Ainsi, il n’y a pas de masse commune et pas de parasitage possible d’un circuit sur l’autre. La tentation est grande d'utiliser aussi sur la sortie 7 un optocoupleur (pour l'entrée de rétrosignalisation 39). Mais cette solution ne fonctionne pas car le courant de fuite du phototransistor est suffisant, même si la diode n'est pas sous tension, pour activer l'entrée du module de rétrosignalisation. L'utilisation du contact franc d'un micro relais est la bonne solution.
L'électronique associée à la carte K8055 a fait l'objet de la réalisation d'une carte additionnelle type Veroboard. Les deux cartes sont empilées ainsi (vue des deux côtés) :